2017 .1.9
【連載2】こっそり教える、エンコーダーの秘儀
磁気式/光学式エンコーダーの構造とメリットとは?
今回から、いよいよエンコーダーの原理を知るために、その内部構造についてご紹介していきます。
この記事をご覧の読者の皆様は、エンコーダーが工作機械やロボットなどの位置決めなどに用いられることはご存知でしょう。ただし一口にエンコーダーと言っても、たとえばロ―タリー式とリニア式など、多様な種類があります。
ここでは、代表的なエンコーダーとしてロータリー式を対象とします。位置をセンシングする検出法から大別すると、エンコーダーは光学式と磁気式に分けられます。光学式は、サーボモータなどのシャフトとともに回転する円盤(ディスク)にスリットが付けられています。手前に置かれたLED光がスリットを通過すると、受光素子(フォトトランジスタなど)が信号を検出する方式です。
一方、磁気式は光の代わりに磁気を検出する方式になります。たとえば、磁気テープと同様の方法で、ドラムに磁気を着磁(N極/S極を交互に着磁)して、それを磁気センサで検出する方式や、N極/S極の磁性体を回転させて、コイルの電磁誘導によって磁気を検出するものなど、いろいろな方式があります。
光学式と磁気式は、それぞれ構造上やセンサの特性によって、メリットとデメリットがあります。たとえば光学式は、応答性に優れ、高分解能で精度も良いという特徴があります。検出信号が光なので、高磁場の場所でも利用できます。ただし機構が若干複雑で、耐環境面では少し弱いところもあります。
磁気式の場合は、光学式ほど高分解能にはつくれませんが、シンプルな構造で、コンパクトな設計が可能です。またコスト面でも優れています。そして何よりも堅牢で、耐久性がある点も見逃せないところでしょう。
光学式と磁気式の選定では、どちらが良い悪いという話ではなく、利用する環境、要求スペック、コストなどによって、適切なものを選んでいくことが重要になります。
インクリメンタル型か? アブソリュート型か?
さてエンコーダーには、もう1つ押さえたいポイントがあります。それはインクリメンタル型とアブソリュート型の違いです。ここからは、両者の特徴について触れてみたいと思います。
インクリメンタル型は、相対的な位置や角度を計測する方式です。任意の始点から、どのくらいの量だけ移動・回転したのかという相対量がわかります。したがって位置決めを行うには、必ず原点に戻って、そこから始める必要があります。またシステムの電源が切れた場合にも、原点復帰が求められます。
アブソリュート型は、決められた原点からの絶対的な移動・回転を検出する方式です。絶対的な位置がわかる仕組みのため、たとえ電源が切れても、特定の位置が保持されます(ただし一般的なアブソリュート型エンコーダーでマルチターンを検出する際は、回転数のデータがメモリに記憶されるため、バッテリが必要になります)。そのため工作機械やロボットなど、原点からの絶対量が求められる用途に有用です。
それぞれの構造についても、光学式エンコーダーを例に簡単にみていきましょう。
まずインクリメンタル型では、【★図1】のようなディスクの円周に沿って、細いスリットが細かく並んでいます。これが位置を検出するための分解能のベースになるものです。前出のように、このスリットから通ったLED光を、もう1つの小さなスリットを重ね合わせることで90度の位相差にして、受光素子側で検出するわけです。検出された光はパルス出力として、A相とB相になります。
【★図1】
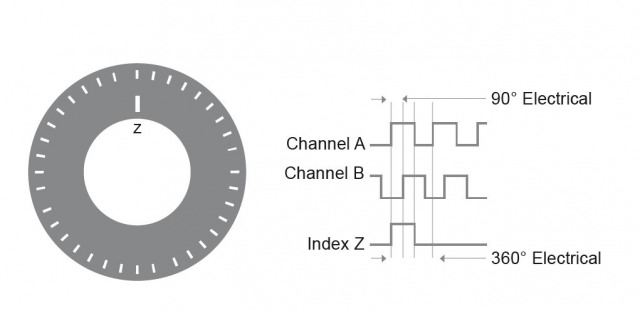
光学式のインクリメンタル型エンコーダーに使われるディスク。円周上にスリットが刻まれており、これが分解能のベースになる。出力パルスはA/B相とZ相。
A相とB相は位相が90度ずれているため、電子回路で排他的論理和(ExOR)を取れば、電気的に分解能を増やすことも可能です。またA相とB相の関係から、回転方向(CW/CCW)も判断できます。このほかにも1回転を検出するためのZ相が設けられています。たとえば分解能が3600pprであれば、1回転ごとにZ相が出力され、3600ppr×回転数ぶんのパルスがカウントされる計算です。
一方、アブソリュート型のスリットはインクリメンタル式よりも複雑です。【★図2】のように、2進コードに相当するスリットが円周方向に刻まれているからです。システム(サーボモータなど)の1回転に対して、すべての位置情報が一定のコードに対応するようになっています。多回転時の位置を検出するマルチターンの場合には、前述のように回転数をメモリーで保持しているため、一般的には内蔵バッテリが必要になります。
【★図2】

光学式のアブソリュート型エンコーダーに使われるディスク。この円周上で2進コードに対応するスリットが刻まれ、1回転における絶対がわかる。
たとえば図の5の位置では、G0:L、G2:H、G3:H、G4:L(L:ローレベル、H:ハイレベル)の信号が検出される。
第3回目は、POSITAL(FRABA社)が開発したロータリーエンコーダーについて詳しく見ていきましょう。同社のエンコーダーは、磁気式アブソリュート型でありながらも、他社にない独自のテクノロジーを採用している優れた製品です。今回の内容は、POSITALのエンコーダーを理解するうえで基礎となるものなので、ぜひ頭に入れておいてください。
 ホワイトペーパー
ホワイトペーパー
モーションコントロールシステムが信頼性の高いフィードバックを受け取ることができるためのエンコーダのアプローチを解説しています。
コラムで取り上げた製品についてはこちら
| 製品 | POSITAL FRABA バッテリーレス アブソリュート ロータリーエンコーダ |
|---|---|
 |