2022 .8.8
スマートマニュファクチャリングを実現する最適化されたシリアル to イーサネット通信
何十年もの間、シリアル通信は多くの工場アプリケーションにおいて信頼性の高い接続を提供してきました。最近ではイーサネット通信が一般的になっていますが、多くのレガシーデバイスが未だにシリアル通信を利用しています。工場主がOT/ITの融合がもたらす運用効率の最適化をますます認識するようになり、フィールドエンジニアおよびシステムインテグレータは新旧のシステムを統合するという課題に直面しています。幸い、シリアルデバイスサーバなどのソリューションにより、シリアルデバイスと最新のイーサネットベースのシステムとのギャップを埋めることができます。しかし、シリアル通信とイーサネット通信のデータ伝送方法は異なるため、シリアルからイーサネットベースネットワークへ移行する際、TCP/IPネットワークおよび読み取り/書き込み性能の安定性に懸念が生じる可能性があります。
MoxaのシリアルデバイスサーバNPortシリーズにはリアルCOMドライバと呼ばれる機能が搭載されています。リアルCOMドライバはホストコンピュータに仮想COMポートを作製し、ネットワーク上のIPポートをマップすることで、シリアルソフトウェアアプリケーションを変更することなく、エッジのシリアルデバイスはまるでシリアルケーブルで物理的に接続されているかのようにホストコンピュータと通信することができます。さらに、リアルCOMドライバが備える豊富な高度機能により、仮想シリアルポートはネイティブシリアルポートに可能な限り近いパフォーマンスを発揮できます。このコラムでは、CNCマシンおよび無人搬送車 (AGV)の監視という2つのアプリケーションにおいて、このリアルCOMドライバを用いることでいかに簡単にシリアル to イーサネット通信が抱える課題を克服できるかご説明します。
シナリオ1: CNCマシンの監視
レガシーCNCマシンは通常、RS-232通信を使用しています。CNCマシンの生産性を最適化するにはリアルタイムデータの収集が重要となり、これによりダウンタイムを短縮したり、製造プログラムをタイムリーに切り替えるための速やかな対応を取ることができます。つまり、リモート監視アプリケーションが制御室からCNCマシンを制御および監視できるようにする必要があるのです。シリアルデバイスサーバを利用し、シリアルベースのCNCマシンと制御室のイーサネットベースシステムの間の通信をブリッジすることで、これを実現できます。しかし、異なる通信方法間のデータ伝送はネットワークの信頼性を不確実なものにし、さらに、イーサネットネットワーク経由でシリアルデータを変換することで、データの送受信に影響を与える可能性があります。
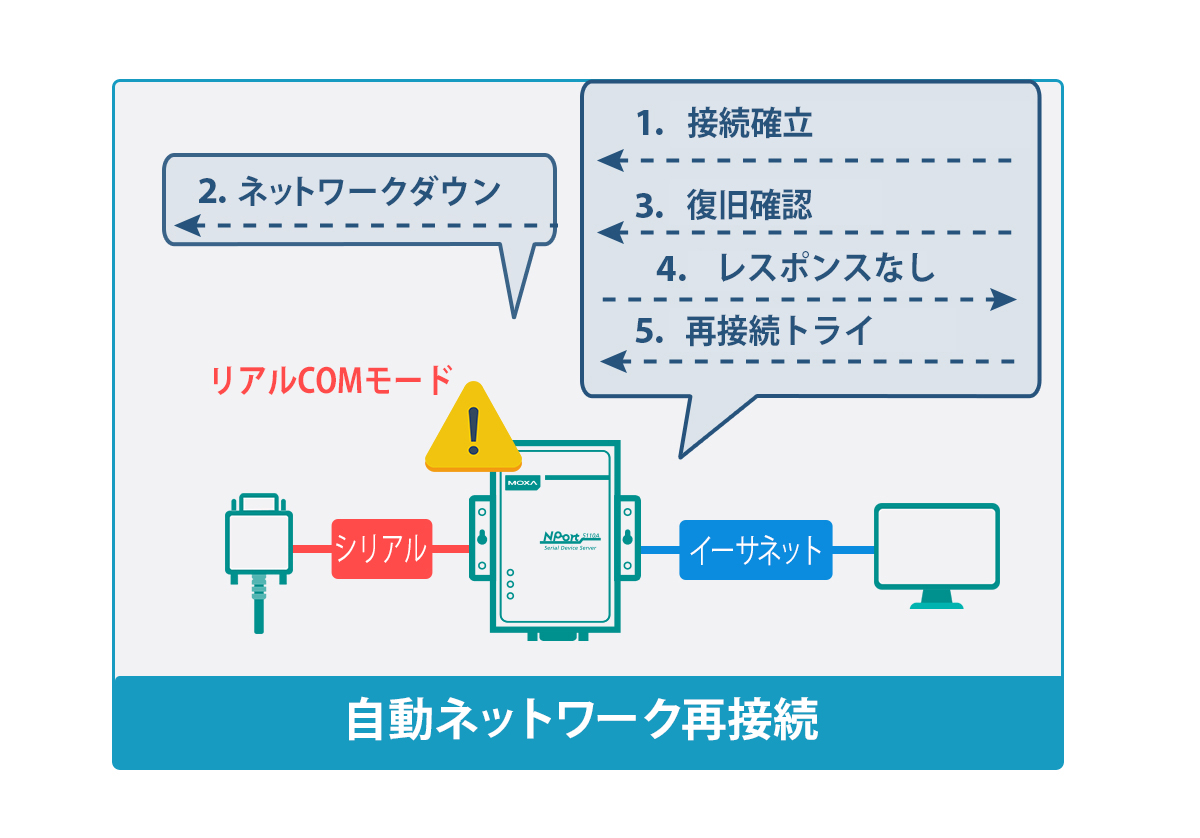
NPortを利用した解決方法 – 自動ネットワーク再接続で接続を維持
リアルCOMドライバに内蔵された高度な自動ネットワーク再接続機能により、CNCマシンのイーサネットベースシステムへの接続が確保されます。TCP接続が切断され、シリアルデバイスサーバNPortシリーズがAlive Checkパケットに応答しない場合、リアルCOMドライバがTCP接続の再構築を繰り返し試みるため、再接続のためにポートを閉じソフトウェアを再び開く必要がありません。
NPortを利用した解決方法 – TxモードおよびFast Flushによる伝送性能の向上
リアルCOMドライバはCNCマシン監視アプリケーションの伝送性能を向上させる機能を提供し、可能な限りネイティブCOMポートに近い動作性能を実現します。まず、Txモード機能はハイパフォーマンスモードを備えており、データが送信されるとNPortドライバはアプリケーションプログラムに通知できるようになります。これにより、NPortドライバがNPortからの確認を受信した場合のみアプリケーションプログラムに通知する従来のモードと比較し、伝送性能およびスループットを向上させることができます。
Fast FlushはWindows OS用に設計された機能です。アプリケーションによっては、ユーザーのプログラムはデータの読み取りもしくは書き込みの前にWin32 PurgeComm()関数を使用します。プログラムがこのPurgeComm()関数を使用する場合、NPortドライバはローカルバッファをフラッシュする前にNPortファームウェアに待機しているデータがないか確認するため、NPortのファームウェアに問い合わせを続けます。その結果、応答時間が長くなります。より速い応答時間を求めるアプリケーションに対応するため、Fast Flush機能はNPortファームウェアに問い合わせることなくローカルバッファを直接フラッシュし、伝送性能を向上させます。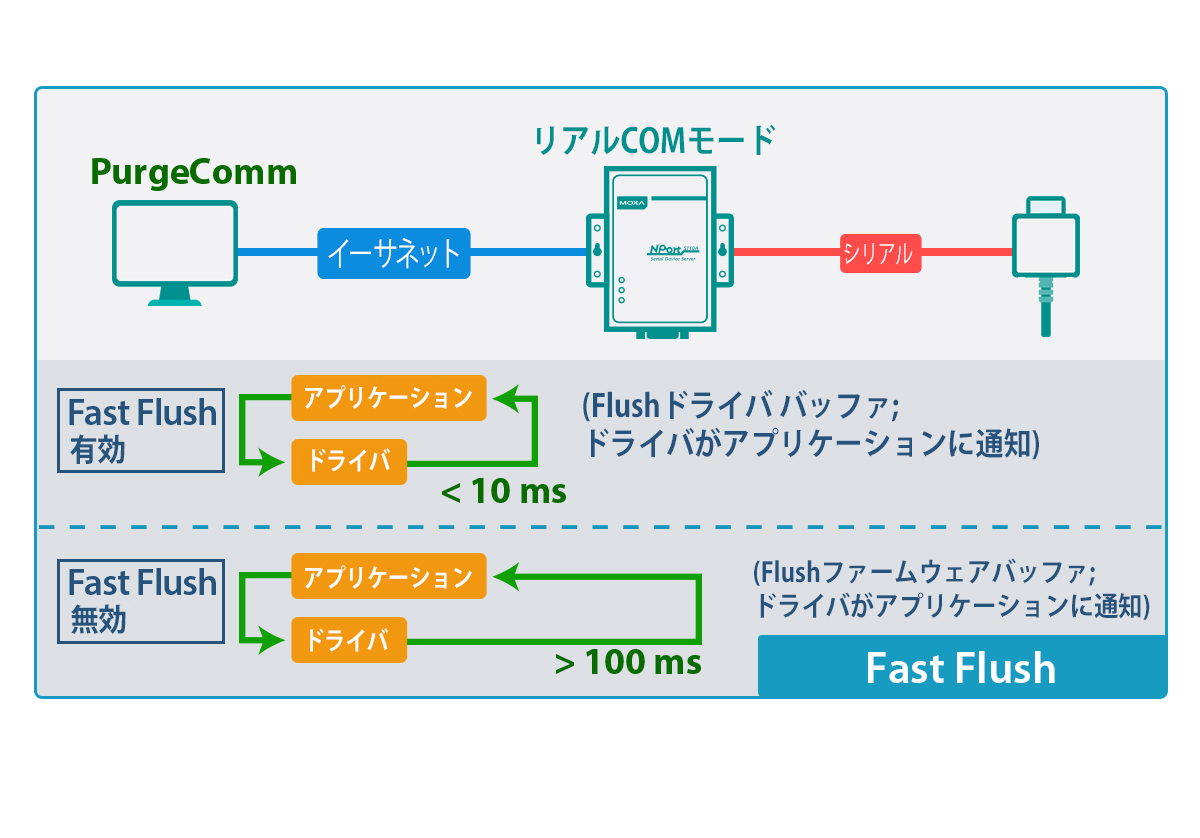
シナリオ2: AGV監視
AGVは製造施設や倉庫での持ち上げ作業や搬送作業を自動化するため、効率を向上させ、人件費を削減することができます。通常、AGVを誘導する磁気テープが経路に貼られ、AGVは内蔵されたRFIDなどのガイドセンサでたどります。アプリケーションソフトウェアは、現在地を確認するための位置情報リクエストを応答を得るまで50ミリ秒毎に送信します。位置が特定されると、ソフトウェアはタスクコマンドを送信します。多くのアプリケーションプログラムにはデータの送受信に特定のタイムアウト制限があります。AGVのコントローラが予定通りに位置情報リクエストに応答できない場合、アプリケーションはリクエストを送信し続け、通信全体の効率の低下につながります。
NPortを利用した解決方法 – データパッキングおよび強制送信による伝送時間の制御
MoxaのNPortリアルCOMドライバは、いつどのように伝送用にシリアルデータをパックするか決定し、AGV操作におけるスムーズな通信を保証するデータパッキング機能をサポートしています。シリアルデータは、パケット長を指定するか特殊文字が検出された場合にパックされます。データパケットにルールがない場合、もしくは不完全なデータパケットを送信したい場合は、強制送信機能により完全なシリアルデータストリームを待つ最大時間間隔をあらかじめ調整することができます。文字間のタイムアウト間隔がこの機能を定義し、特定の時間、ファームウェアがシリアルデータを同じデータフレームにパックさせます。この機能を有効にすることで、NPortシリアルデバイスサーバは、内部バッファがいっぱいになるか文字間間隔がタイムアウトした場合のみ、バッファに蓄積されたデータをTCP/IP経由で転送します。

MoxaのNPortシリアルデバイスサーバは、様々な動作モードに多様な機能を提供し、産業アプリケーションにおける要望にお応えします。さらに、セキュリティ機能を備え、様々なOSドライバに対応しているため、シリアルデバイスを最新のシステムに簡単かつ安全に接続するのに役立ちます。
コラムで紹介されている製品はこちら
| Moxa – NPortシリアルデバイスサーバ |
 |
こちらのコラムを読まれた方には、下記の記事もおすすめです。
 |
 |